Les robots, des outils efficaces... mais relativement coûteux
Les robots de désherbage apparaissent comme une solution idéale dans un contexte de moindre utilisation de produits phytopharmaceutiques et de faible disponibilité en main-d’œuvre. Cependant, répondent-ils aux attentes des agriculteurs et maraîchers wallons ? Sont-ils rentables ? Ou doivent-ils encore évoluer ? Le Cra-w s’est attelé, durant trois ans, à répondre à ces questions.

Depuis 2020 déjà, le Centre wallon de recherches agronomiques (Cra-w) met à l’essai plusieurs robots de désherbage permettant, d’une part, de réduire – voire d’abandonner – le recours aux produits phytopharmaceutiques et, d’autre part, de diminuer la main-d’œuvre en charge de cette tâche particulièrement chronophage et pénible. L’objectif du projet, qui prend fin cette année, est d’évaluer comment ces « nouveaux ouvriers agricoles » peuvent répondre aux attentes des agriculteurs, sur le plan de leur efficacité mais aussi en termes de rentabilité.
Quatre modèles à l’épreuve
Quatre robots ont pris part aux essais. On retrouve deux modèles enjambeurs, actifs essentiellement sur l’inter-rang (Dino et Anatis, développés respectivement par les constructeurs Naïo Technologies et Carré). S’y ajoutent Oz (Naïo Technologies), un robot de plus petite taille qui ne travaille que dans un rang à la fois, et le cobot enjambeur Toutilo (Touti Terre). Ce dernier à la particularité de pouvoir accueillir deux personnes en position assise, pour le transport, ou en position couchée, pour le travail. Il est ainsi possible de combiner un travail robotisé de désherbage de l’inter-rang avec un travail manuel de nettoyage du rang.
« Tous ont été évalués en conditions réelles, en suivant un itinéraire technique visant l’absence totale d’adventice. En 2021, les essais se sont déroulés dans une parcelle de choux-fleurs tandis qu’en 2022 une parcelle betteravière a été sélectionnée », détaille Véronique Leclercq, en charge du projet.
Cinq critères ont fait l’objet d’une évaluation : la qualité du désherbage, la sélectivité et les éventuels dégâts à la culture, la précision du guidage, l’autonomie et la consommation électrique et, enfin, la faisabilité économique.
Un désherbage sélectif
Les résultats, obtenus sur deux années différentes, et donc dans des conditions d’enherbement distinctes, révèlent que l’efficacité du désherbage hors du rang est supérieure à 90 % lorsque l’on recourt aux robots. Sur le rang, elle n’est que de 16 à 40 %. « Cela montre la nécessité de développer des outils intra-rang, à adapter aux engins actuellement disponibles sur le marché. »
La sélectivité vis-à-vis de la culture est également très bonne : le pourcentage moyen de perte oscille entre 5 et 10 %. « Il convient de superviser le travail effectué par le robot durant un trajet inter-rang ainsi que son demi-tour en bout de parcelle afin de s’assurer de la qualité du désherbage et du bon réglage de l’outil. »
La qualité du guidage du robot et de l’outil a, quant à elle, été évaluée hors champ et au champ. Dans la première situation, dans 95 % des cas, l’erreur de guidage demeure sous 5 cm. Dans la seconde situation, l’erreur de guidage est inférieure à 10 cm dans 95 % des cas (moins de 5,6 cm avec le cobot). Dans 50 % des cas, elle est même inférieure à 4 cm (2,3 cm avec le cobot). « Le cobot se montre plus précis car l’homme repositionne l’engin correctement en début de rang », commente Mme Leclercq. Et d’estimer également que « les constructeurs devraient améliorer la qualité du guidage des robots au champ ».
La scientifique note néanmoins que la précision du positionnement des engins s’améliore au fur et à mesure qu’évoluent les technologies qu’ils embarquent. Le remplacement de certains d’entre eux en cours de projet permet de confirmer ce constat.
La technologie : avantages… et inconvénients
Le paramètre « autonomie » a été étudié en évaluant le temps que met un opérateur pour démarrer un robot et régler un éventuel problème (caméra dysfonctionnelle, arrêt de sécurité, adventice trop grande…) par rapport à la durée du travail effectué par l’engin. In fine, il ressort que plus les robots sont riches en technologies, plus ils sont autonomes et plus le travail gagne en rapidité.

« A contrario, la technologie accroît également le risque d’avoir des problèmes et complexifie la résolution de ceux-ci. Dans certains cas, l’opérateur n’est pas en mesure de résoudre le problème rencontré et doit contacter le constructeur. » Un bug peut donc s’avérer être chronophage, voire bloquant.
Le projet pointe donc la nécessité d’améliorer la fiabilité des technologies embarquées mais aussi le service après-vente.
Est-ce rentable ?
Enfin, le coût que représente le recours aux robots constitue le dernier paramètre étudié. Pour ce faire, le coût total de désherbage a été évalué, tenant compte du coût de propriété et du coût d’utilisation. La première variable dépend de la valeur d’achat de l’engin, de sa valeur résiduelle, de sa durée de vie, du taux d’intérêt (dans le cas d’un financement par emprunt bancaire), des taxes et assurances, de l’abonnement RTK et du taux d’utilisation. La seconde variable tient compte de la consommation d’énergie, du temps consacré par l’opérateur aux robots et des réparations et maintenances. Ce dernier point n’a cependant pas été évalué dans le cadre du projet au vu de la période d’utilisation du matériel.
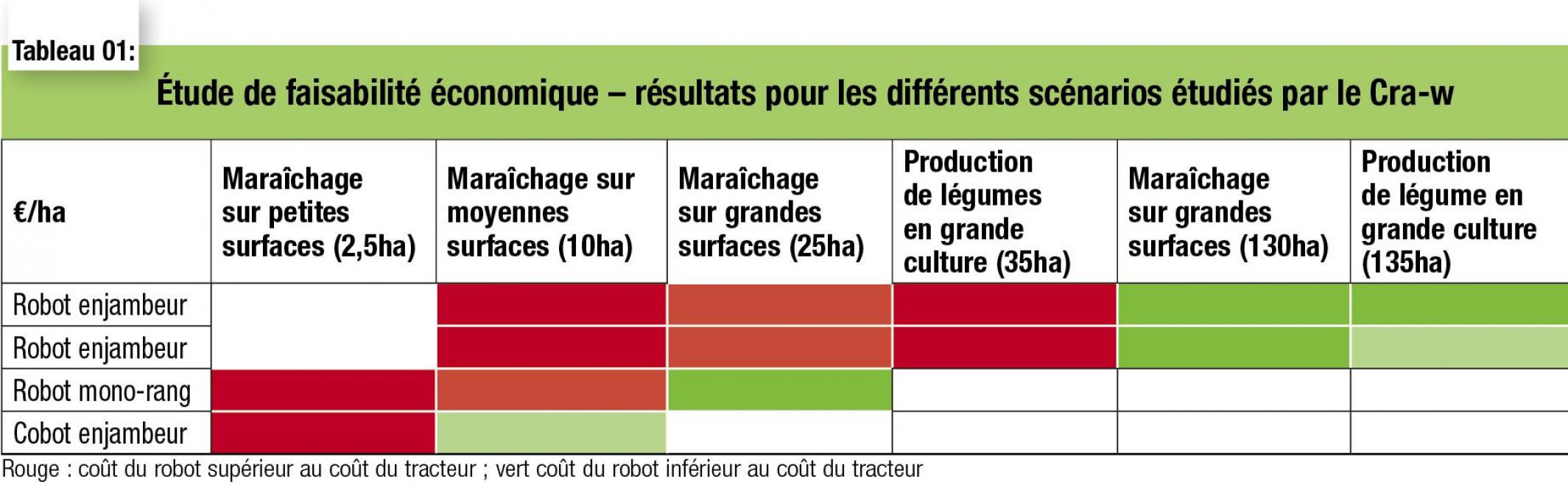
L’ensemble des données récoltées sur le terrain ont ensuite été extrapolées à quatre types d’exploitation maraîchère : sur petites surfaces (2,5 ha et 0,1 ha/parcelle), sur moyennes surfaces (10 ha et 0,5 ha par parcelles), sur grandes surfaces (25 ha et 0,75 ha/parcelle), et production de légumes en grande culture (35 ha et 3 ha/parcelle). La durée annuelle d’utilisation du robot retenue est de 2.400 heures (1.000 heures pour le cobot).
Les résultats obtenus ont été comparés aux coûts que représenterait un travail équivalent effectué avec un tracteur (tableau 1). Ceux-ci montrent qu’un engin autonome de ce type doit être utilisé sur des surfaces suffisamment grandes que pour atteindre la rentabilité. Les plus grands modèles requièrent même une surface de travail de 130 ha. Concernant les robots, cela s’explique par un coût de propriété largement supérieur au coût d’utilisation alors que ces deux paramètres sont sensiblement équivalents pour le cobot essayé. Ce dernier présente toutefois un coût de main-d’œuvre supérieur inhérent à son mode de fonctionnement.
Pour accroître la rentabilité de ce type de solution, Véronique Leclercq suggère de multiplier les tâches que les robots peuvent prendre en charge, de mutualiser l’usage de ces engins (par le biais d’une Cuma ou d’une entreprise de travaux agricoles) ou encore de réduire le prix d’achat.
Adapter les robots à la complexité du terrain
Concernant les évolutions possibles de ce type de matériel, outre la nécessité de réduire les coûts, Mme Leclercq pointe les actuels freins législatifs et estime qu’un travail est nécessaire pour permettre l’utilisation de matériel autonome sous une surveillance effectuée à distance, et non au sein de la parcelle.
Enfin, l’adaptation des robots à la complexité des exploitations est un point qui doit particulièrement susciter l’attention des constructeurs. « Ceux-ci sont actuellement développés pour des schémas simples de monoculture sur grande surface. Pourront-ils être adaptés à la complexité à venir des fermes (mélange de cultures, mélange de variétés, nouvelles cultures, diversification…) ? », interroge-t-elle. Voilà qui devrait inspirer plus d’un acteur de la robotique, dont on sait que le nombre va croissant ces dernières années.





